NILabVIEW项目,LabVIEW在电子元器件中的应用



- 面议
- 2022-11-01 06:52:05
- LabVIEW开发,LabVIEW项目,LabVIEW编程,La..
- 王经理 13691203761
- 北京瀚文网星科技有限责任公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

信息介绍
详细参数
利用下一代医学成像技术以及PXI模块化仪器系统与NI LabVIEW进行进展性癌症研究
概述:使用OCT技术与授予专利的光源技术,并通过带有32个PXI-5105数字化仪的256同步通道的高速(60Ms/s)数据采集系统予以实现。
OCT是一种非入侵式成像技术,它提供半透明或不透明的材料的表下、断层图像。OCT图像使我们可以以与一些显微镜相近的精度可视化地展现组织或其他物体。OCT越来越受到研究人员的关注,因为它具有比核磁共振成像(MRI)和正电子发射型断层成像(PET)等其他成像技术高很多的分辨率。此外,该方法不要求我们作其他准备,而且对于患者非常安全,因为我们使用的激光输出能量非常之低并且无需使用电离辐射。
OCT利用一个低功耗光源及其相应的光反射以创建图像,该方法类似于超声,但我们监测的是光波,而不是声波。当我们将一束光投射在一个样品上,其中大部分光线被散射,但仍有小部分光线以平行光的形式反射,这些平行光可以被检测到并用于创建图像。
别系统概览
我们的任务便是利用光学解复用器创建一个高速傅立叶域OCT系统,以支持来自以192.2 THz为中心频率、频率间隔为25.0 GHz的宽带入射光(波长为1559.8 nm)的256个窄频带的分隔。频谱分离使得PXI-5105数字化仪的256个高速模数转换器(ADC)通道能以60 MS/s的采样率进行数据采集,并对所有的频带进行同步检测。
我们的系统包含32块8通道的PXI-5105数字化仪,它们分布在三个18槽的NI PXI-1045机箱上。我们利用NI PXI-6652定时与同步模块和NI-TClk同步技术,实现不同机箱上的数字化仪的同步,它提供了数十皮秒精度级的通道间相位同步性。我们选用PXI-5105是因为其高通道密度——每块板卡八个输入通道,这样使得256个高速通道的系统保持较小的外形尺寸。当我们完成数据采集之后,我们利用LabVIEW进行数据处理和可视化展示。
利用傅立叶域OCT系统中的光解复用器充当频谱分析仪,实现了每秒六千万次轴向扫描的OCT成像。利用一台共振扫描装置进行帧速率为16 kHz、每帧1400 A-线和3毫米深度范围的左右扫查,我们的OCT成像展示了23 µm的精度。
系统深度描述
在我们的系统中,所采用的光源是一个宽带超发光二极管(SLD,由NTT电子提供原型产品)。我们利用一个半导体光放大器(SOA,来自COVEGA公司,BOA-1004型)放大该SLD的输出光信号,并利用耦合器(CP1)将其等分导入到样本支路和参考支路。我们调整SOA1的输出光信号强度,使得样本信号的功率为9 mW,以满足ANSI的安全限制。我们的系统利用一个准直透镜(L1)和一个物镜(L2),将样本支路光信号导入到采样点(S)。我们使用一个共振扫描装置(RS、光电产品、SC-30型)和一个电镜(G,剑桥技术出品,6210型)扫描采样点的光束。我们的系统利用光照明光学收集来自采样点的后向散射或后向发射的光信号,并利用一个光循环装置C1将其导入至SOA2(来自COVEGA公司,BOA-1004型)。我们通过一个耦合器CP2(耦合比为50:50)整合SOA2的输出信号与参考光信号。该参考支路由光循环装置C2、准直透镜L3和参考反射镜RM组成。
我们的系统利用两只光解复用器(OD1与OD2)分离CP2的输出信号,以实现平衡检测。它利用平衡图片接收装置(来自New Focus公司,2117型)——共有256个图片接收装置,检测来自这两个OD的具有相同光频率的输出信号。它利用前述快速多通道ADC系统的32块PXI-5105数字化仪,检测来自图片接收装置的输出信号。所采集数据在单次采集过程中存储于数字化仪的板载深度存储器中,然后传输至计算机供分析。
就同步检测干涉频谱而言,OD-OCT与SD-OCT相似。其差别在于OD-OCT同时在不同频率以数据采集速率检测整个干涉图谱,而不是像SD-OCT那样——在某个时间跨度内累计输入到CCD检测装置中。因而,它根据数据采集系统的数据采集速率——在现有系统中该速率高达60 MHz——来确定轴向扫描速率。共振扫描装置的16 kHz速率确定了帧速率。我们仅使用了一个扫描方向进行数据采集(50%的占空比),从而得到每帧的采样时间为31.25 μs。该系统在每帧中获得1875次轴向扫描;然而,由于共振扫描装置的左右扫查呈高度非线性,我们仅使用了1400次轴向扫描,舍弃了475次轴向扫描。
研究结果
我们将动态范围定义为点扩散函数(PSF)的峰值与样本支路畅通时的背景噪声间的比值。我们根据结果估计,动态范围在各种深度下均约为40 dB并随着深度加深略有下降。OD-OCT的一个技术优势在于AWG的每个通道所检测的频带宽度小于25 GHz的频率间距。40 dB的动态范围基本足够生物组织的测量。
我们利用中性密度滤光镜将发射光衰减了39.3 dB。粗实曲线是在阻塞样本光信号的情况下测量所得的背景噪声。由这些数值确定的敏感度按照右手侧的垂直刻度标示。
图像的渗入深度约1毫米,浅于通常利用SS-OCT或SD-OCT获得的2毫米渗入深度。这是由低敏感度决定的。为得到一幅3D图像,需要大量的OCT截面。受限于存储器的大小,我们把采样率降至10 MHz。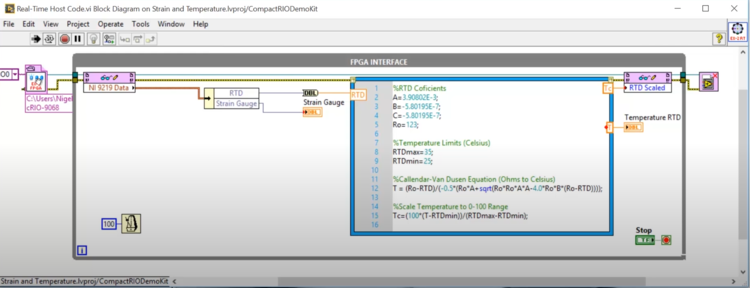
我们使用 NI LabVIEW 与 NI TestStand 开发灵活的软件架构,以解决目前及未来的测试需求。这套软件的功能众多,能够测试不同版本的产品,以及开放式与封闭式硬件。使用 NI TestStand,我们可以利用商业可用的测试执行功能来节省开发时间。
使用定制化的操作界面,操作员可以登陆、载入选出的测试序列,然后监控测试过程。界面也会提供即时资料更新给操作员、生成测试报告,然后将所有的测试资讯记录到资料库中,供日后分析之用。我们在 LabVIEW 中撰写个别的测试,这也可以节省开发时间,因为我们拥有庞大的函数库可以测量、与硬件连接、分析结果,以及显示。通过模块化操作界面进行序列控制,并将其与个别测试模块分开,我们便能将开发的成果使用于更多有类似测试需求的产品上。以统一的格式记录所有的数据,我们的研发与生产工程师就能进行分析并找出趋势,并制作生产收益的报告。他们也会使用数据分析失败原因,并在设备制造的过程中找出待改进之处。记录中拥有所有的测试资料,包含使用的序列、参数、测试仪器的校正日期、测试时间,以及产品的通过 / 失败状态。
NI TestStand 成果斐然
新的功能测试系统协助我们在紧迫的时间压力下完成工作,将新产品的设计从概念阶段带入制造阶段。NI TestStand 为我们的 LabVIEW 测试模块制造了一个模块化、可重复使用的测试架构,NI TestStand 对我们来说非常实用。从的角度来看,我们现在可以在的短时间内就开发完成测试系统,因为与软硬件开发有关的大部分风险都被移除了。我们初期的训练投资成本也因为开发这个的时间缩短,而且收回了成本。在未来的开发中,因为我们的工程师已经习惯使用这些工具,所以我们预期开发的时间会缩短 30 %。
使用CompactRIO、labview 平台监控露天矿场使用的机器铲
概述:使用NI CompactRIO平台与NI LabVIEW软体来创造的客制化振动与压力连续监控系统。
露天矿场使用的机器铲是大型、活动式、非静止的机器,用来装载卡车,将矿石运送到加工厂。通常机器铲与卡车的数量比例约为1 比12,所以机器铲若发生意外的停工,便会对产量造成直接的影响,所以机器铲被视为关键性的机器。
习惯上来说,要为这种机器铲进行状态监控与预测性技术是很困难的,这是因为缺乏足够的分析运算法与设备,而且环境太过恶劣。普通设备的传统振动分析(旋转机器进行预测性维修的主要工具) 是根据傅叶尔转换来执行的,傅叶尔转换会假设旋转速度不变。这对机器铲来说是不够的,所以便使用另1 种方法。
因为急需从回应式、预防式的维修策略转变成预测式、主动式的策略,所以便开发了SiAMFlex 这种弹性监控系统(Advanced System for Flexible Monitoring)。原先是智利Concepción 大学Pedro Saavedra 教授所进行的计画,目的是要为机器铲的振动信号发展出适当的振动分析运算法。等到运算法发展完毕之后,下一步就是执行SiAMFlex 做为连续监控系统的核心。现在SiAMFlex 是由CADETECH 公司支援并持续更新,以维持完整的机械结构资产完整管理与分析工具。
监控系统包括了车载设备(on-board equipment)、1 个无线(off-board) 伺服器、电脑与无线网路设备。机器铲的车载设备包括:
加上NI cRIO-9014 - 8 槽式机箱的CompactRIO 系统
供振动量测用的NI 9233 模组
供动态应变量测用的NI 9237 模组
提供、高解析度转速测定资料的NI 9422 模组
提供机器铲控制系统补偿讯号的NI 9205 模组
装在机器铲主要旋转元件(马达与齿轮箱传动装置) 上的压电加速度计
装在机器铲主要结构元件上的应变计
主马达上的增量编码器
无线网路设备
电力滤波设备
车载的CompactRIO系统需要加速度计、编码器与应变计同时提供信号。振动与应变信号持续受到监控,并与设定的警报值做比较,在问题产生时可以抢先通报。如果发生警报时,信号会以使用者定义的间隔定期储存。发生这种状况时,CompactRIO平台的监控应用可以寻找佳的分析量测时段,并佳化信号杂讯比。运用本法,资料会定期以预设的间隔储存,以控制终的机械改变,而发生突发事件时资料也会记录下来。碰到以上2种状况时,机器铲控制系统的补偿信号会储存起来供参考之用,并提高主动校正的可能性。
撷取的资料暂时储存在CompactRIO 的内部快闪硬碟中,然后透过无线连结自动下载到主要伺服器中,资料在主要伺服器中处理、与更多复杂的警报参数比较,然后储存在资料库中。如果无法无线连结到伺服器时,使用者可以透过短程、点对点的无线连结(使用者靠近机器铲以建立连结) 连上并手动下载资料;接上乙太网路连接线,或是在CompactRIO的USB 插槽上插入随身碟,资料便会自动上传。<0}
资料一旦处理储存好了,就可以供下列之用:使用者视觉化、分析、手动处理,以及在伺服器上进行趋势管理,或是有网路可存取资料库的电脑,也可进行趋势管理。所有的组态、资料移转、处理、视觉化与分析软体都充分内建在LabVIEW 里。
CompactRIO模块
涡轮增压器性能中重要的变量包含温度、压力和转速。系统组件包含多个NI C系列模块,包括NI 9217 RTD模拟输入模块测量电阻温度传感器(RTD)温度、NI 9211热电偶输入模块测量热电偶温度、NI 9203数据采集模块测量压力和电流、NI 9423漏极数字输入模块测量转速。此外,还采用了NI 9265同步更新模拟输出模块作为系统和模拟输出值的外部接口,NI 9425漏极数字输入模块和NI 9476源数字输出模块用于数字I/O值。检测系统由系统操作员通过用户界面进行控制。监视外部系统使得用户可以控制和管理整个系统。
结论
涡轮增压器是车辆引擎的重要部分,其性能直接影响整个引擎的性能。对涡轮增压器性能进行适当的测试是确保终产品质量的关键步骤。以前的PLC系统无法提供所需的精度。使用基于CompactRIO的全新检测系统替换PLC系统节省了空间,并且提供了更高的精度、更高的分辨率和更好的性能。此外,由于系统开发员熟悉CompactRIO的开发方法,可以在短时间内让系统开始运行,这样节省了时间和开发资源。
使用LabVIEW 建构非侵入式技术而测得水果成熟度
概述:NI LabVIEW可找出平行板电容器双板之间的佳距离。
因为农业的原料与后农产品均需达到相同品质,所以在采收前后了解水果的品质与成熟度格外重要。但是一般果农难以确实得知水果的成熟度,特别是果色与成熟度无关的水果。虽然或果农可以看出水果成熟度,但也无法因应大量采收的水果。因此我们需要稳定、快速、非侵入式的技术,测得水果的物理属性而进一步了解水果的品质与其成熟度。只要能且自动分类水果的成熟度,就能进一步让农业升级,并造福超级市场的消费者。举例来说,若能根据采收条件而系统性的了解水果成熟度,就能让消费者进一步判断水果品质。
大多数的传统方式均具有破坏性,而无法大量应用于实务中。某些方式则透过硬度计(Penetrometer) 或冲击力,测得水果的硬度。另可量测与成熟度相关的参数或化学物含量,如pH 酸碱值、可滴定酸度(Titratable acidity,TA)、可溶性固态物(Soluble-solid,SS) 含量、乙烯(Ethylene) 含量等。若要量测这些化学值与参数,往往侵入水果再应用复杂的分析技术,如气液相层析(Gas - Liquid Chromatography (GLC) 与滴定法(测酸度)。
但近出现了非侵入式的水果成熟度检测法。这些方法包含核磁共振(NMR) 与质子共振(PMR),可了解可溶性固态物的含量;机器视觉系统则可减测水果果皮的颜色;音讯系统则可测出水果硬度。但是这些方式仍有潜在问题,如NMR 与PMR 均为位的设备,且水果颜色不一定与其成熟度相关。
使用LabVIEW和PXI定位飞行过程中飞机的噪声源
概述:基于NI LabVIEW软件搭建一个应用程序,并使用NI PXI硬件从布置在跑道上的相位麦克风阵列采集数据。
研究客机上的噪声源
为了能开发出更为安静的客机,我们定位所有的噪声源,以加强我们对噪音生成原理的认识。在开发一架飞机时,我们可以通过数值分析和模型测试预测噪音等级。然而,实际飞机噪音的属性和特性只能在实际飞行测试中才能获得。利用声音波束成形技术来定位噪音源是一种有效可行的方法。波束成形是一种使用定位噪声源的方法,同时能获得噪声源的振幅。虽然我们在JAXA项目上小型模型飞机的风洞测试和飞行测试中已经发展并改进了这项技术,但还未曾将这项技术应用于实际飞行的飞机中。2009年,我们拥有了一架小型Mitsubishi MU-300 Diamond商务机。2010年,我们开始在跑道上设置了相位麦克风阵列,通过噪声源定位测量来验证我们现有的技术,并找到可以提高的空间。
相位麦克风阵列的测量
相位阵列包含了许多麦克风,分布在一个大直径的范围上。利用噪声源的声波到达每个麦克风时间的微小差别,我们可以估算出每个噪声源的位置和强度。在这个测试中,我们设计了相位阵列来辨识飞行于120米高度的飞机上两个相距4米的1kHz音频信号。这个相控阵列包含了99个麦克风,分布在一个直径30米的圆形区域上。
飞行中的噪声源定位测试包括飞机发动机状态; 声觉测量,以及飞机飞过相位阵列时的位置、高度和速度。因为飞机产生的噪音在传输到地面麦克风的过程中会被大气削弱,因此我们还需要记录气象数据,例如风向、速度、温度和湿度。
- LabVIEW开发,LabVIEW项目,LabVIEW编程,La..
- 应用软件
- 王经理
LabVIEW在导航中的应用信息
-
 盐城建湖县现金回收老银元袁大头服务周到¥ 9999
盐城建湖县现金回收老银元袁大头服务周到¥ 9999 -
 优雅圣仑波光跳泉经久耐用¥ 2000
优雅圣仑波光跳泉经久耐用¥ 2000 -
 安徽淮南大清银币宣统三年价值多少钱面议
安徽淮南大清银币宣统三年价值多少钱面议 -
 商洛定做玻璃钢拉挤槽钢服务至上面议
商洛定做玻璃钢拉挤槽钢服务至上面议 -
 辽宁大连水上乐园设备租赁出租出售,支架水池水上闯关¥ 999
辽宁大连水上乐园设备租赁出租出售,支架水池水上闯关¥ 999 -
 门头沟进口电动熟食车性能可靠,商用熟食车¥ 5000
门头沟进口电动熟食车性能可靠,商用熟食车¥ 5000






