服务项目 |
LabVIEW程序,LabVIEW编程,LabVIEW软件开发,LabVIEW项目 |
面向地区 |
全国 |
这里只是简单的宣传,不一定符合您的要求,登录公司网站,可以查看更多详细信息。这里只是简略的介绍,有任何关于LabVIEW、LabVIEW开发、LabVIEW编程、LabVIEW程序相关问题,请与我们联系。
:
使用NI LabVIEW控制双重机器人系统,为中风病患提供上肢治疗运动
概述:使用NI LabVIEW软体为2个客制机器人执行的即时控制系统,机器人透过设计给治疗师使用的使用者介面(UI)来沟通,以协调并协助人类的手臂动作。
机器人的设计
智慧气动手臂运动(iPAM) 是种双重机器人系统,用来提供反覆的治疗运动给因为中风而导致上肢运动有问题者。iPAM 有2 个气动式机器人,特色是拥有3 个致动旋转关节,可以控制笛卡儿空间(Cartesian space) 中机器人的末端受动器。机器人贴住上肢的方式就像治疗师进行运动时抓住手臂一样:1 个机器人贴住前臂靠近手腕处,而另1 个则贴住上臂中间处。
此外,矫具(orthoses) 会抓住手臂,然后进行3 个被动旋转自由度(DOF),以确保手臂与机器人是舒适对齐的。物理治疗师会手臂透过机器人的末端部位进行治疗动作,然后记录下这些动作。这套系统会记录下施加在手臂上的力量大小与机器人关节的运动。之后iPAM 系统便会重复这项运动,以协助病患做完完整的动作(如图1),而iPAM 提供的协助程度则可由物理治疗师决定。
控制系统
iPAM 机器人能提供主动力,以协助人类手臂的运动。所以机器人能够有效协调,因为错误的对齐或是对手臂施加过大的力量会导致疼痛或受伤。为了达成目标,我们开发了1 种新型控制系统,可以在人类关节的DOF 运作,而非机器人的笛卡儿端点。手臂简化成1 种拥有6 个DOF 的模型,其中肩膀有5 个DOF (2 种平移动作跟3 种旋转动作),而手肘则有1 个。因为2 个机器人可以各控制3 个DOF,所以可以限制上肢的6 个DOF。
人类关节的角度不是由iPAM 直接量测,所以角度由人类手臂与相关的机器人接触点位置等已知的运动学资讯来预估,这只要针对人类手臂模型进行直接反向运动学公式即可取得。但是这个公式不能处理软组织介面(皮肤、肌肉与辅具填料) 引起的量测误差,也不能处理肩膀关节的运动奇异位置(kinematic singularity)。
因此我们使用贾氏转置(Jacobian transpose) 方法开发1 种新型迭代公式,这是根据手臂的前向运动学所开发的,评估起来更容易。重要的是,这个方法很清楚知道有量测误差与运动奇异位置的存在。为了提供手臂位置的正确评估,控制回路每次反覆运算都会处理50 次反覆的前向运动,控制回路以500 Hz 的频率运作。这使得即时控制器有很高的运算能力,而且有的即时效能,以力求稳定。
将每个机器人量测的力量转换进入上肢协调系统,我们便能执行进入控制(admittance control) 计画,可以针对特定的上肢关节提供协助。进入控制计画运作的方式是依照治疗师设定的僵硬与阻尼参数,量测每个人类DOF 的转矩与力量,并调整目标关节的位置。
使用高度协助(设定为高僵硬程度) 时,机器人可以高度重现治疗师预设的动作。这对于几乎无法进行主动动作的病患来说非常适合。降低协助程度(设定为较低的僵硬程度) 可以跟预设的动作有较多的偏移差距,适合可以进行较多主动动作的病患,或是当病患的行动性提高时。模型中每个关节的协助程度都可以各自调整,同时又维持动作的协调模式。
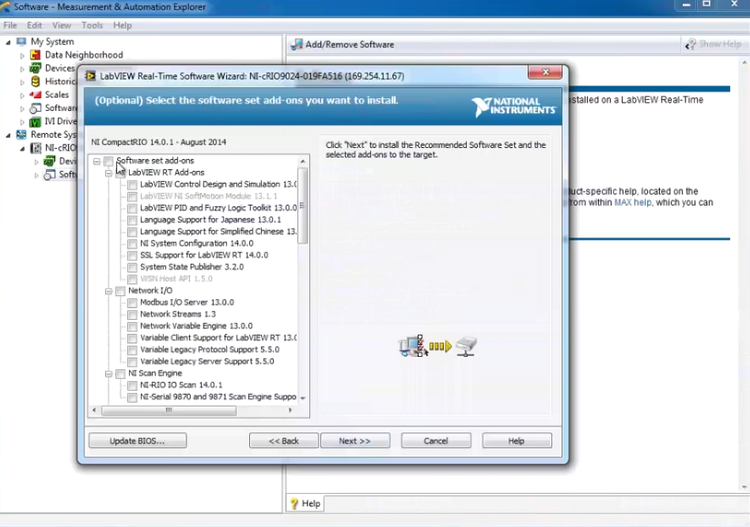
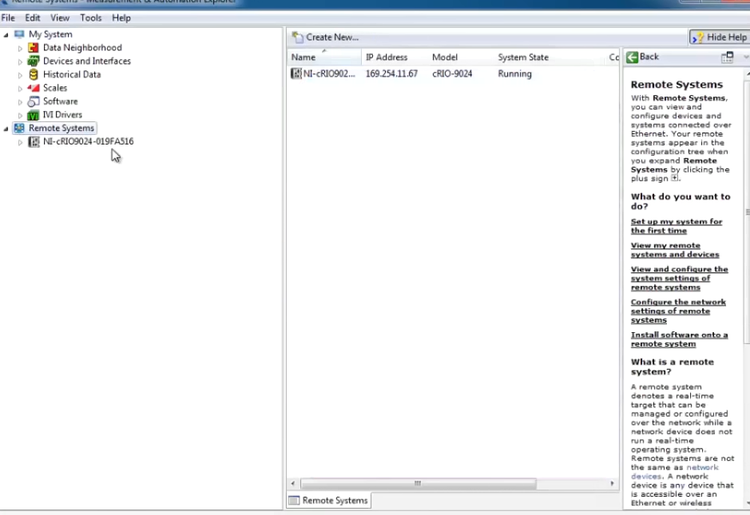
执行
我们使用LabVIEW Real-time Module与NI介面卡来执行iPAM即时控制器,以发挥其讯号I/O的功能。输入感测器拥有2个6轴力传感器(force transducer)、6个非接触式旋转感测器、3个电位计以量测肩膀位置,以及数个数位输入端子供安全开关使用。类比输出讯号能控制12个成对压力调节阀,负责在每个机器人的关节驱动低摩擦力的气动式汽缸。控制器完全是依照状态运作,让程式码符合逻辑、可扩充,并容易审查。即时OS让控制器执行,以确保整体系统的可靠度与安全度。
物理治疗师使用笔记型电脑做为用户端,用UI 开启,提供病患所需的指示、运动提示与成果回馈,以跟iPAM系统介接。该用户端使用TCP 协定的乙太网路连结与即时控制器进行异步通讯。UI 的主要元件是工作空间的3D 呈现。使用LabVIEW 的OpenGL 架构3D 图片控制器,可以即时传送特定任务的资讯给病患。
即时控制器拥有2 个模组:1 个处理的控制回路,以及1 个可延缓处理的通讯模组,此模组可与笔记型电脑互相传送及接收资料。即时控制器回路以500 Hz 的频率运作。这结合了上肢位置的贾氏评估,以及2 个机器人使用的笛卡儿位置控制系统。
临床试验
我们以2 次小规模的临床研究试办计画来执行iPAM 系统,我们找了26 位因为中风而导致手臂损伤的人来参加总长20 小时的机器人疗程。每次疗程都会使用大约40 分钟的机器人治疗。在研究过程中,iPAM 在超过300 个小时的使用时间中协助进行超过13000 种主动动作。病患接受系统的意愿很高,数名病患在手臂动作方面也有进步。在试验时没有发生不利病患的状况,而且即时控制器在2 次试验中都维持稳定的表现。LabVIEW 环境的模组化本质对本系统的原型制作与开发非常有利。
这里只是简单的宣传,不一定符合您的要求,登录公司网站,可以查看更多详细信息。这里只是简略的介绍,有任何关于LabVIEW、LabVIEW开发、LabVIEW编程、LabVIEW程序相关问题,请与我们联系。
:
使用NI PXI和LabVIEW缩短射频功率放大器的特征化时间
概述:使用NI LabVIEW软件和NI PXI模块化仪器开发功率放大器特征化系统,让我们在减小资产设备成本、功率消耗和物理空间的同时,将测试吞吐量提高了10倍。
现有功率放大器特征化技术的挑战
尽管无线射频功率放大器主要被设计在单频带单模式下工作,现代的功率放大器要满足更为多样化的需求。实际上,现代功率放大器的设计可以工作在八个或更多频带下,并且能够用于包括GSM、EDGE、WCDMA、HSPA+、LTE等多种调制类型。
我们需要在多种频率、电压电平、温度和功率范围下测试日益复杂的组件。一个典型组件完整的特征化过程需要大约30,000到40,000行数据对设计进行完全测试。使用传统的机架射频测试设备,每行数据大约需要10集,这样每个立组件需要超过110小时进行测试。
设计替代的PXI测试系统
为解决缩短射频组件特征化测试时间的挑战,我们基于NI PXI、LabVIEW和NI TestStand,开发了功率放大器特征化测试系统。我们的功率放大器测试台包含以下仪器:
NI PXIe-5673 6.6 GHz矢量信号发生器
NI PXIe-5663 6.6 GHz矢量信号分析仪
NI PXI-5691 8 GHz可编程射频放大器
NI PXIe-5122 100 MS/s高速数字化仪
NI PXI-2596双6x1 26 GHz多路复用器
100 Mbit/s数字I/O模块
传统机架频谱分析仪
外置功率计、电源
LabVIEW
NI TestStand
NI GSM/EDGE测量套件
用于WCDMA/HSPA+的NI测量套件
我们使用LabVIEW软件更新了现有的测试计划,在NI PXI测试台上完成相同的测量序列。由于在PXI测试系统上的测量速度更快,我们配置特征化序列尽可能使用PXI测试台,仅在需要的时候才使用传统的机架仪器。
NI PXI的优点
决定使用PXI的主要原因是能够在不牺牲测量精度的情况下实现更高的测量速度。通常,在之前射频放大器测试台上,射频测量所需的时间占了整个特征化时间的绝大部分。PXI利用高速数据总线、多核CPU和并行测量算法实现了尽可能快的测试速度。此外,NI GSM/EDGE测量套件和用于WCDMA/HSPA+的NI测量套件使用合成测量,所有测量可以使用一组I/Q数据完成。我们使用这些工具包能够测量例如增益、效率、平整度、ACP、ACLR、EVM和PVT等功率放大器特征。
使用PXI得到的结果
通过使用PXI完成功率放大器测试台的大部分测量,我们将功率放大器特征化时间从两周缩短为大约24小时。此外,我们在每个GSM、EDGE和WCDMA测量测试中都观察到了测量时间的显著改进。表1 比较了传统测试台和PXI测试台的测量时间和速度提升。
传统测试台测试时间(s) PXI测试时间(s) 速度提升
GSM测试 6 1.1 6倍
EDGE测试 14 1.1 14倍
WCDMA测试 9 1.1 9倍
在单个测量序列中,PXI测试台完成快了6至11倍。时间是基于100帧的测量得到的。
结论
因为我们使用了NI PXI模块化仪器,在无需牺牲测量精度的前提下显著缩短了射频功率放大器的特征化时间。我们以比原来传统仪器解决方案相同或更低的成本,构建了全新的PXI测试系统。我们还预期会在未来的测试系统中使用NI PXI。
这里只是简单的宣传,不一定符合您的要求,登录公司网站,可以查看更多详细信息。这里只是简略的介绍,有任何关于LabVIEW、LabVIEW开发、LabVIEW编程、LabVIEW程序相关问题,请与我们联系。
:
以NI PXI 模组化仪器与LabVIEW 建立UHF RFID 平台
概述:以NI PXI模组化仪器搭配NI LabVIEW软体,建构可重设的UHF RFID读取器(Reader)与标签模拟(Tag emulation)平台,可迅速实验新概念并制作原型。
读取器模拟平台
读取器模拟平台,可针对EPC C1G2相容的读取器,模拟其传输与接收作业。传输作业是由1组NI PXIe-8108嵌入式控制器、1组NI PXI-5652 RF讯号产生器、1组NI PXIe-5450 I/Q波形产生器、1组NI PXIe-5611 I/Q向量调变器所进行。另一方面的接收作业,则是由NI PXIe-5641R IF收发器所建构的「RFID Tag Sniffer」所进行。此收发器可数位化已接收的讯号,并对基频执行相位解调与降转换作业。系统亦内建Xilinx FPGA,可呈现位元切割器(Slicer)与改良的FM0解码器。平台外接元件则有1组Alien ALR-9800 RFID读取器,还有1组UPM Raflatac主动式RFID标签。相关通讯作业将由读取模拟器撷取之后接着处理。
为了控制RFID 读取模拟器的作业,我们撰写了LabVIEW VI。VI 将搜集相关RFID 的Reader-to-Tag 输入参数,如开机/关机期间、前置符码(Preamble) 值、读取器指令序列等。这些参数将产生编码序列,以建构复数值的基频讯息波形,再升转换为UHF 频带以利传输。如此一来,所传输的读取器波形即可符合EPC C1G2 UHF RFID 标准,还有自动化测试作业所使用的FCC Part 15 规范。
标签模拟平台
读取器模拟平台,可针对EPC C1G2 相容的读取器,模拟其传输与接收作业。此篇解决方案的创新之处,在整合了多组天线而能建构多样的接收器,而能提升如SNR 的效能,并延伸RFID 标签的读取或涵盖范围。多组天线的标签测试台,则使用NI PXIe-8108 嵌入式控制器、NI PXI-5652 RF 讯号产生器、16 位元NI PXIe-5622 - IF 示波器、NI PXIe-5601 - RF 降转换器、客制化UHF 印刷式偶极(Printed dipole) 天线。我们以NI 模组呈现下列UHF 主动式RFID 标签的区块:(1) 功率撷取器(2) 振幅移键解调器(3) 基频处理器。
标签的功率撷取器(Harvester) 包含倍压器(Voltage multiplier) 与稳压器(Voltage regulator) 各1 组,可供电至标签。振幅移键(Amplitude shift keying,ASK) 解调器则属于简易的封包侦测器,可解调RF 讯号再传送至基频处理器。基频处理器会接着解码封包讯号,再粹取、解译RFID 指令。图2 为RFID 读取器的程式图,还有NI PXI 系统上所建置的标签。
图2. 建构RFID 读取器与标签模拟的程式图
提升RFID 读取器与标签的效能
针对UHF RFID 读取器,我们开发并测试了新的FM0 解码器,并于RFID 标签中整合智慧型天线的技术,如空间分集组合(Spatial diversity combining)。目前的FM0 解码组合,易受到标签后向散射(Back-scattered) 讯号的影响而达+/- 22% FM0 资料率变量;而普遍的相关架构(Correlation-based) 组合尤为如此。
我们在这里布署了复杂的频率同步化组合,用以补偿此资料率变数;但高度依赖FPGA 资源并忍受极长的处理延迟。为了解决此问题,我们于RFID 读取器模拟平台上开发创新的FM0 解码组合。此解码器是采用工作周期(Duty cycle) 的量测作业,可立于资料率变数之外而作为主要的解码参数。图3a 即为改良后FM0 解码器的LabVIEW VI 程式图。
FPGA 综合报表指出,改良之后的FM0 解码器仅占用了5.9% 的FPGA 分割,且处理延迟仅达8 个时脉周期。透过目前通用标签的实际后向散射标签讯号,即可确实验证解码器的功能。在此设定中,我们将编码器平台设定为RFID Sniffer,从RFID 读取器与标签通讯作业中撷取后向散射讯号。图3b 即为已接收的后向散射标签回应,还有对应的解码波形。来自于标签的实际后向散射讯号,均可由改善后的FM0 解码器完成解码。透过位元错误率(BER) 量测作业可发现,若工作周期计算所用各符码的样本数增加,则改善后的FM0 解码器可达更能。
图3. LabVIEW 中的FM0 解码器:(a) VI 程式图与(b) 人机介面正显示解码器波形
我们也整合了分集集合,进一步提升了RFID 标签效能。另针对主动式UHF RFID 标签,更于标签模拟平台上建构了前/后封包(Pre-/Post-envelop) 侦测集合技术。此集合技术包含Selection diversity combining、Predetection direct additive combining、Predetection equal gain combining、Predetection maximal ratio combining、Postdetection direct additive combining、Postdetection ratio squared combining 等。图4a 为RFID 标签系统的LabVIEW VI,并整合了分集组合。
此系统所进行的测试作业,可了解标签读取范围所提升的程度。读取器模拟平台将传送20,000 笔预先建立的读取器指令,且均由标签模拟平台接收/读取。针对不同的分集组合,均由标签记录成功的读取数,且读取器与标签将以0.3 m 为单位而区隔0.6 m ~ 6 m。图4b 则为标签模拟平台人机介面显示成功的读取。透过实验结果,我们的平台可整合接收分集(Receive diversity) 至RFID 标签中,提升主动式UHF RFID 系统达26.67% 读取涵盖效能。
图4. LabVIEW 中的RFID 标签模拟:(a) VI 程式图与(b) 人机介面正显示成功的作业
使用NI 软硬体的优势
在选用了NI PXI 模组化仪器之后,将可透过模拟与实际硬体实验,进一步提升RFID 系统的概念验证(POC)。且能取得有效、有意义的数值,更逼近实际建构的结果。NI PXI 平台的可重设特性,可随时因应不同的硬体设定,如多重接收器系统链与不同的空间分集;我们的案例即为UHF RFID 系统中的智慧型天线。此外,LabVIEW VI 的直觉式设计环境与内建的完整函式库,可大幅缩短系统开发时间(如RFID 标签讯号的所需解码功能)。